I am really enjoying the work environment and crew onboard the F.G. Walton Smith, it is very collaborative as we brainstorm solutions on how best to do projects or how to fix problems that arise. Everyone trusts, respects, and has each other’s backs while also joking around and having laughs all day. It’s the little things. Over the weekend, we went kayaking out to an old wooden shipwreck ~2nm offshore, where we anchored up and went snorkelling, it was super fun!
On Monday, Alesha and I attacked the Head Vacuum Pump that created suction for the head system and fed into the blackwater tank. It was a dirty job, nonetheless we suited up and took the pump apart, cleaned the duckbill valves, and replaced the torn rubber gasket that created the suction for the pump. This is a picture of us suited up in Tyvex suits, goggles, and gloves:

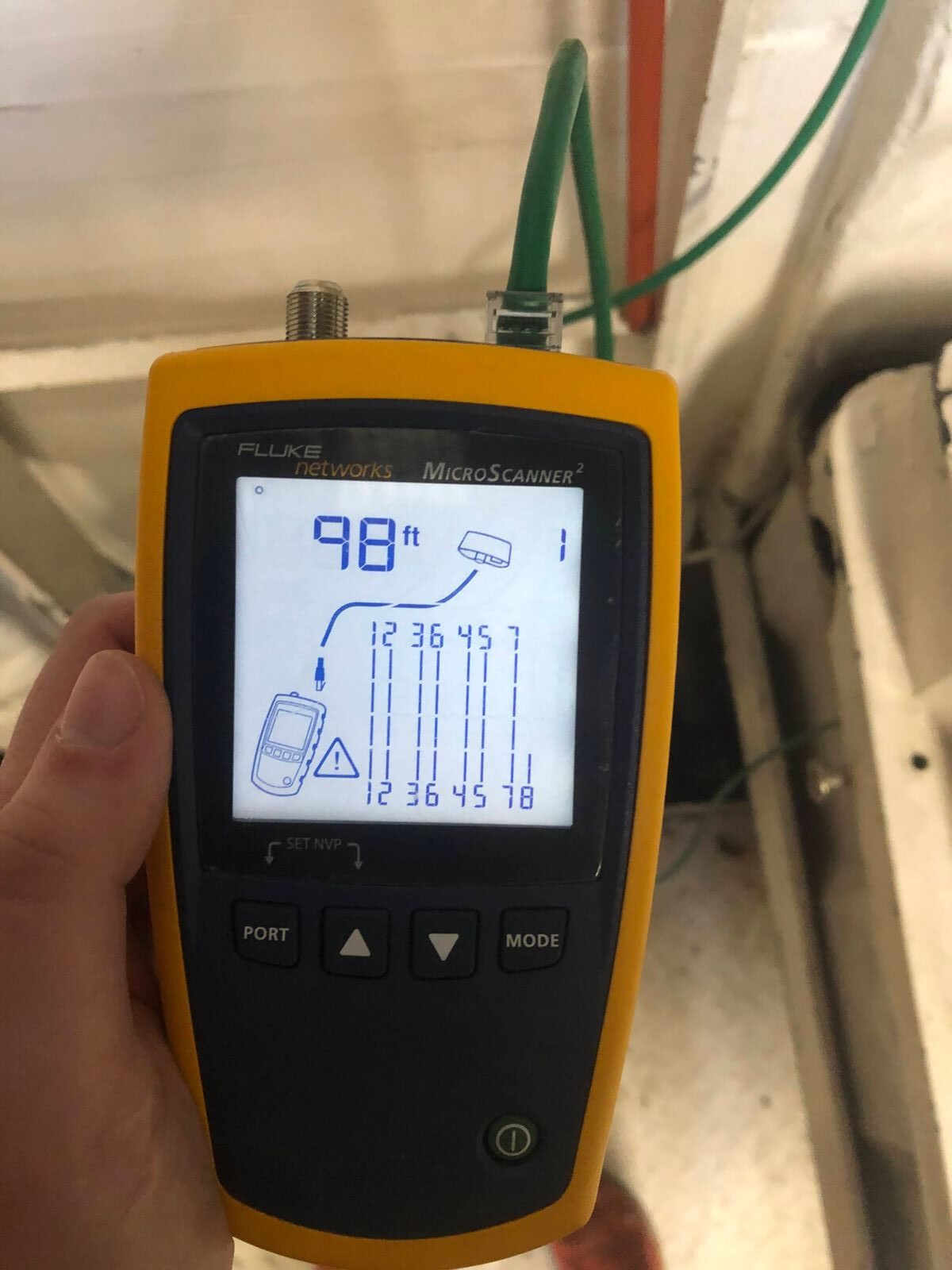
Tuesday morning, we finished putting the vaccuum pump back together, after the silicon had dried on the rubber seal and pump shaft. In the afternoon, we continued our project with the Marine Tech on running Cat 6 wire from the Marine Tech Lab (where the terminal port is to connect to the switch, which then can be connected to Campus Safety’s server). Eventually, we will set up two more exterior cameras that will look down the port and starboard sides. We will use our newly acquired skills to make RJ45 connections to make a terminal connection in the overhead so that we can run an exterior grade wire out of the main superstructure to an overhang on both bridgewings. The picture below are the common tools that a Marine Tech may use for testing, creating, and removing connections through wire. This includes a multimeter to test voltages, amperages, resistance, and continuities when troubleshooting electrical issues, a scanner that can determine length of wire, connections between pins, wire cutters, and crimpers.

On Wednesday, we started up the engines at 0800 and got underway around 0930 for a quick jog down through Stiltsville as a Vibration Technical Expert ran a vibration analysis on the hull of the ship. They are testing the ship before and after the engine swap in order to make sure the hull doesn’t lose any integrity from the vibrations of the engines. We made it back around 1100, just in time for lunch. Around 1230 we helped out with some crane operations to get the two life rafts off of the O-1 Deck to send off to get recertified and checked out by the manufacturer. We continued removing bulkheads to find a pathway for our wires in the afternoon.
On Thursday, we got our wiring figured out, had to make a few cuts in the 2x4s in the overhead and fix some of the wooden bracings in the bulkheads. We then worked with the Chief Engineer to fix the broken check valve in the hot water system. After fixing the hot water system, we attempted to move the commercial sized refrigerator to do a favor for the cook and plug in a cord leading to the toaster. As we started pallet jacking it up, we accidentally snapped an old pipe that was from an older ice-box system, and water rushed out flooding part of the kitchen. We quickly shut off the potable water (part of the system we had just been working on with the hot water heaters) and went to work dewatering with a recipriocating pump. We ended up cutting a hole in the wall to put a permanent plug on the leftover piping.
It has been a busy but highly productive week and it is rewarding to check some projects off the list and to work with this stellar crew. I learn a lot everyday and enjoy the people I am working with.