I hope you had a great 4th of July last weekend–I certainly did, and I’ve got some updates to share!
Starting off strong, I’ve continued to dig into the world of big data science, and I’ve been exploring some tools that other institutions and entities have made for robotics and similar projects. The good news is their solutions are offering guidance on what ours should look like, but the neutral news is that their solutions aren’t going to work for our solution!
I’ve been putting together a presentation to share my research and findings with the rest of the Sentry software team, and I’ll be presenting that this Thursday to receive feedback and input on my proposed architecture design. To give you an idea of the type of thing I am talking about, here is a quick mockup of a possible solution’s architecture.
The other really exciting thing that happened this week isn’t exactly to do with Sentry, but it was inspired by it. Being around big, awesome, deep sea vehicles really gets you inspired. So inspired, in fact, that you may even become the owner of a vehicle yourself–for your own tinkering and scientific experiments of course.
This past weekend I picked up a deep cherry red 1975 Honda CB200 motorcycle.
I drove a moving truck 100 miles, on a 6 hour drive that should have taken me 2 hours, through peak 4th of July traffic to retrieve such a treasure and I’ll say it was completely worth it. Here’s a picture of the motorcycle when I picked it up.
And here are some comparison pictures on my first maintenance project; de-rusting and revitalizing the front suspension forks.
left fork before Right fork after
This small beast definitely has a lot of work left, but no worries because I don’t even know how to drive a motorcycle yet. All in good time!
This week I got to get my hands a bit more dirty and really dive into the mechanics of data science and the data world of robotics.
I’ve been assigned a project which will help Sentry and other AUVs utilize machine learning, deep learning, and other advanced computer thinking techniques.
The problem statement and background is this:
Sentry cruises are structured in that there are a certain number of dives each cruise, anywhere between 5-15 is typical. Between each dive, when the vehicle is pulled shipside there are a number of checks and maintenance tasks performed on the vehicle. During these checks, experts will look over the data that Sentry retains from the dive. There is so much data, but the type that these experts are after is the engineering data and the sensor data. Engineering data reports upon things like thruster performance and battery health during the dive, whereas sensor data is the juicy stuff: it’s what the scientists are after, and what the whole point of the dive is. The thing is, the sensor data is helpful for us engineers as well. Experts can comb over the sensor data and notice if sensors are calibrated incorrectly, or if something is going wrong on a hardware or software level. The engineers then adjust the hardware and software accordingly, and this process happens each dive.
The issue is, some errors are sneaky, and not detectable even to the trained eye until much later in the post processing process, after the cruise has ended. This ends up causing big problems, as it can even render scientific data unusable or “dirty”. So the long term goal of the project I am working on is to automate this process, and be able to catch any errors or data discrepancies in the field, and be able to adjust accordingly so valuable data isn’t lost.
The specific project I am working on to meet that goal is about assembling a machine learning pipeline to automate that process and to even learn new things about the data in the process. The part of the pipeline “under construction” right now is the data staging area. We have tens of terabytes of archived dive data, from just Sentry dives alone. The question is, how do we successfully manage and organize this data, and using what platforms and tools, so that it is optimized to make Sentry a smarter robot? So that the solution is optimized to be used for training and deploying models, that can greatly improve the performance of not just Sentry, but other vehicles in due time.
Anyways, that’s a bit of what I’m working on! Right now it is mostly in the design and planning stages, but like I said, I’m getting my hands “dirty” with a bit of code!
Since my last post, I have concluded my technical internship aboard the R/V Atlantis. Now that I’m back home, I can take some time to update my blog and tell the story of Alvin Dive operations.
Departing Dutch harbor on June 15, we set sail further west along the Aleutian chain.
Pilot boat pacing alongside the Atlantis waiting to pick up the Pilot.
Arriving at our first dive location on the 15th a few miles off Bogoslof island, my job was to arrange the science basket by installing and moving around push cores and bio quivers, attaching Niskins, and securing bio boxes. I would meet with the Alvin Pilots frequently, getting feedback on equipment position and making changes to ensure the instruments were in optimal positions for the robotic arms to access.
Science basket prepared for first dive operation
The morning of the 16th at 5:30am, we started completing the first pre-dive checklists of the expedition. My role as a mechanical technician that morning was to top off all of the compensated volumes on the vehicle. These are oil filled volumes that enclose various critical systems including the main junction boxes, battery contactors, and solenoids. There were 3 main types of oils that I would top off: bray, carnation, and hydraulic. Topping off these volumes included plugging in a portable pump sprayer, with the desired oil, into one of the the fill ports on the vehicle and connecting a drain bottle to the opposite end of the system. I would then lightly pressurize the system, monitoring the fluid entering the drain bottle, ensuring there were no air or waters pockets within the system. This process was repeated for each of the 14 main oil compensated volumes on the port and starboard side of the sub.
Taking a short break from pre-dive tasks to watch this breathtaking sunrise over the Bering Sea.
My morning tasks would vary by day. Sometimes I would polish and inspect the windows while other days I would spend most of the pre-dive making basket adjustments, ensuring all the sample collection devices were arranged how the science team and pilot preferred.
Testing the port side manipulator to ensure all joints are functioning properly.
Next, we would roll the sub out onto the back deck, and install the drop weights. These six weights are the main form of major buoyancy adjustment. All six attached allows the sub to descend fast, release two weights to achieve neutral buoyancy, and release an additional two weights to ascend to the surface. The last two weights are reserved to allow additional weight loss, in case extra buoyancy is needed to resurface. These weights are installed using specially designed hand carts that lift them using a hand-crank style forklift mechanism.
Installing steel drop weights alongside Alvin Mechanical Technician, Wren Sakai.
Deploying The Submersible
After all pre-dive checks are completed and signed off, the sub is attached to the LARS (launch and recovery system). The sub is attached to the LARS by several points: a tail line to prevent rotation, a main line wrapped around a titanium T-shaped lifting point, and a large hook that actuates downwards, locking into the lifting T. The pilot and scientific observers enter the submersible, and the hatch is sealed. Two divers are positioned on top of the submersible, and the vehicle is lifted off the deck of the ship. Once the vehicle is over the water, the main line is tightened, allowing the hook to release the vehicle. The main line then lowers the vehicle into the water. Once the sub is floating, the swimmers detach the main line and the tail line, allowing the sub to drift away from the ship. After some final checks, the basket support lines are removed, and the sub is ready to dive. The work boat picks up the swimmers, and the sub floods its ballast tanks, allowing the vehicle to begin sinking.
LARS moving into position to be hooked up to the Alvin sub.
Recovery Operations
After the science dive, we would stage the deck for recovery one hour before the sub surfaced. This included ensuring the tow line was ready to be deployed, and laying out various tools such as drills used to loosen the subs panels and drain bottles for fluid inspection.
The recovery would begin by first lowering the work boat into the water off the side of the ship. The work boat then cruises ahead of the ship to meet the Alvin sub as it surfaced. The boat drops off two swimmers who prepare the vehicle for recovery. When the vehicle is ready to be picked up, one swimmer stays on the sub while the other swimmer boards the work boat. The boat drives back to the ship and positions itself behind the Atlantis, as the ship slowly approaches the sub. We then lower the rear lifelines and prepare to throw the tow line to the work boat. Passing the tow line to the work boat was sometimes my role during the recovery. Once the sub was halfway past the ship, I would toss the heavy rope and floating hook to the work boat. The heavy rope attached to the center-back of the ship would pay out line, and I would monitor the amount of line remaining while communicating with the recovery coordinator. The work boat then intercepts the submersible as the tow line swimmer dives off the work boat, attaching the tow line to the back of the sub. The swimmers then deploy a sea anchor, a sort of underwater parachute secured to the submersible. This allows the sub to be held in tension behind the ship as it is reeled in like a big fish. Once the sub is directly behind the ship, the tail line is lowered and attached to the sub, soon followed by the main line. The sub can then be lifted out of the water and the swimmers dive off the side of the sub to be recovered by the work boat.
Swimmers diving off Alvin as it’s lifted from the water.
One of my frequent jobs was to remove the tow line from the back of the sub after it had been lifted over the deck and as it was being lowered. I would then immediately move into post dive tasks.
One of the Alvin technicians, Scott, removing the tow line as the sub is being lifted onto the deck
Post Dive
Once the sub landed on deck, the Alvin team and I would move in with pins to secure any remaining weights, install life lines, rinse down the sub with fresh water, and place protective covers over the windows.
Me rinsing down the windows and cameras post dive.
The work boat being lifted out of the water right after recovery.
During the majority of post dives, I would sit beside the sub right after it landed on deck and check every oil volume for traces of water intrusion. I would plug a waste bottle into 19 different oil volume drain lines, one at a time, and inspect for water or abnormalities. During this time, the scientists and pilot climb out of the sub and are welcomed by an applaud from the crew and science team. We then roll the sub back into the hanger and finish an extensive list of post-dive inspections and tasks. My usual job was working the scientists. I assisted in removing various equipment and samples from the basket, so the scientists can begin their analysis and packaging of specimens.
My perspective of checking compensated volumes for water.
This formed the pattern that most days followed with the occasional excitement where I would be asked to repair or inspect components that had failed during the dive. These tasks meant anything from reinstalling damaged mounting brackets on the science basket to disassembling and re-compensating large brushless thruster and hydraulic motors.
One of the large brushless motors partially disassembled and filled with WD40 to drive out any possible moisture.
The 18 day science expedition proved to be a big success! Despite several dive days being canceled due to weather conditions, we were still able to accomplish nearly all of the 13 dives we set out to complete.
Keep an eye out for one more blog update describing the post cruise activities including preparing the Alvin for its next few months of rest and even the non-work related adventures I was able to go on while in Alaska.
Hi everyone! My name is Kaleigh, and I’m so excited to be a MATE intern this year. I graduated from Oregon State University last year, where I studied environmental sciences with concentrations in oceanography, scientific communication, and a minor in graphic design. A bit of a mouthful, I know, but these topics combined together into my love for visual science communication. That passion led me to the NOAA Office of Education (and now the NOAA Digital Program too!), where I work as a communications specialist and graphic designer.
Rewinding a bit, I had the opportunity to do my first research cruise in my sophomore year of college on a small boat called the R/V Elakha. For a biological oceanography class, we went out on the Newport Line on the open ocean, and I immediately fell in love with working on the water. Pursuing this in stride with my love for high-latitude environments, I was then lucky to be an REU intern with the Northern Gulf of Alaska (NGA) Long-Term Ecological Research (LTER) program. Because I wasn’t conducting research on the ship (my project used glider data to study the physical factors affecting the spring bloom), I spent a month on the R/V Kilo Moana (KM) running CTD casts, helping other labs where they needed it, and shadowing the marine techs.
Fun attaching sensors upside down in the KM’s new CTD!On deck of the KM with my fellow REU interns. I’m on the right, repping NOAA!
Once again, I fell in love with the work, admiring the creativity and problem-solving of the marine techs’ job. Having multidisciplinary interests, I was fascinated with how they got to be involved with all the different research projects on the ship, and be so essential to their success at that. Since then, marine technology has been an interest chipping away at the back of my mind, especially as I look to the next phase of my academia and career. I love my science communication work at NOAA, but I miss doing the science! I’m so excited to be on the legendary USCGC Healy and learning all I can about the world of marine technology. As a lover of polar science and a self-described cold-weather-girly, I’m thrilled that I get to experience that in the Arctic, no less!
A big thank you to everyone who helped me get here, and everyone following along on this adventure now. Special thanks to Dr. Seth Danielson, Dr. Maria Kavanaugh, Marissa Jones and the rest of the NOAA Education team, the NOAA Digital Program, my family, friends, Declan, and, of course, the Coast Guard, NSF, and UNOLS.
This week was a little slow on the Healy (literally and figuratively). We were transiting through really thick sheets of ice, and also celebrated the 4th of July. The festivities included movies like Independence Day and American favorites like grilled burgers, hotdogs, and of course popcorn. Although I did miss out on celebrating with friends and family back home, not many people can say they celebrated a major national holiday while transiting through ice in the Arctic Ocean.
Even though we had a slow week, we had some amazing wildlife encounters, seeing plenty more pinnipeds, but more amazing was seeing numerous polar bears, including a mother escorting her two cubs! Seeing these wild creatures in their natural habitat was truly exciting and it was fun seeing all the crew trying to find them with binoculars or telescopes.
As this leg of the cruise is coming close to an end, I have become much more versed in the more important underway collection equipment like the echo sounders and the water walls. While a wastewater dump was happening, we realized we had to turn off our seawater collection to avoid contamination and bad data. This allowed me to learn how to use the freshwater systems to flush both water walls. Now that I have more experience I was tasked with opening one of the water walls entirely on my own while Christina was opening the other water wall. It is beneficial to open both at the same time because the seawater flow goes through the main wall, then continues on to the second wall so when you adjust the flow on one it affects the flow to the other. You generally want the flows to stay the same across both water walls during data collection.
It’s now been a few days since we have been out of the ice but it was a crazy experience hearing and feeling the crushing and scraping against the hull and a totally different experience to being rocked to sleep by the waves. Not to mention not seeing a sunset for almost two weeks!
I am writing my final blog post now that I am at home and comfortable. My time with the Hugh R. Sharp was enlightening. The number of skills and lessons I learned seemed endless.
Summary of Final Stint
During my final leg of this internship, we had to delay a cruise to August due to issues with the coolant systems, hydraulics, and the Caley level wind not functioning properly. This gave us a short amount of time to prepare a fully functional ship for the upcoming Naval Academy cruise. During the mobilization day for the Naval Academy, there was uneasy chatter and an urgent rush to be able to set sail. Slowly, as the mob day went on, problem after problem was solved.
While the problems with the ship were being solved by the engineers, I was with the Marine Techs. Our job was to fabricate the ADCP and EK80 mount onto the pod system that Sharp uses for acoustic sounders.
Pod holding the EK80 and ADCP moved using a crane on the vesselLowered the pod holding transducers into adjustable keel.
Additionally, the techs had to manage and maintain the ship’s CTD, computers, and systems. The last responsibility of Marine techs was to assist the scientists with their equipment setup and be the middleman between the technology and their research goals.
Part of the challenge with being a marine tech and a crew member on a ship is that you constantly have to adapt to what is currently working on the vessel. We had to do this many times at the port and on the sea. This includes alternate CTD rosette mounting designs, adding winches, using backup computers, and much more.
One of the biggest adjustments I had to make at sea was manually controlling the CTD winch, since the sensor on the Caley level wind was broken. Additionally, I had to take an active role in communicating with a walkie-talkie between Science and the Boat driver to get clearance for equipment deployment.
Obtained clearance, then helped science deploy a hyperspectrometer
I even had to go below deck near the engine room to communicate numbers on a screen during ROV operations, due to the display not transmitting. It was later found out that the Ethernet cord for the display was not properly plugged in.
I learned a a lot more during this cruise. My learning highlight was definitely communication skills, through successes and failures.
Conclusion
I would like to thank the amazing crew of the Sharp for making me feel at home and treating me as a crew member. Every day was more fun because of the crew. I would like to give a special thanks to my direct mentor, Christian Kernisan, who had the systems to solve everything and taught me many soft skills along with hard skills to increase my efficiency. I would like to thank my other main mentor, Alex Dominguez, who was always there when I needed, for whatever I needed. Lastly, I would like to directly thank Tim Deering, our Marine Tech supervisor (ex-tech himself), for his wise tidbits and help during some of the more chaotic days.
I’ve had a first week jam packed with learning and exploring, both intellectually and geographically! To start with the intellectual; I have been gaining familiarity with the procedures and structures of which the team at WHOI operates Sentry, as well as digging into databases and machine learning pipelines. A lot of hours of research here, so not much else to share but I have learned a lot!
Geographically, I’ve explored a ton of beaches – my favorite being Nobska Beach which features a light house right on the eastward bluff. I also got to tour a few of the robotics facilities and meet them face to face (the deep sea robots, that is). And, last but certainly not least, I’ve been participating in the summer softball league and lets just say that the Applied Ocean Physics and Engineering team is eaaaasily the best.
Week 2 on the USCG Healy was definitely an unforgettable experience. We have hit sea ice! Something that most people from New York City might not ever have a chance to see in person. This has brought a variety of arctic sea life within visible range of the ship including sea birds, jellyfish, and marine mammals such as whales, seals, sea lions, and walruses.
I started the week inventorying how many Niskin bottles remained after we had an accident in our CTD deployment. We got a harsh lesson on why you do not send the carousel down to depth with some bottles open and some closed. This resulted in a number of bottles imploding. None of our sensors were harmed and we didn’t lose all of the bottles so it wasn’t the end of the world, it did however become my job to test all the remaining bottles for leaks or cracks to determine what needs to be replaced.
Now that I am more familiar with the shipboard sensors and equipment I have been given a lot more responsibility. When aquatic mammals are reported by the bridge, the first thing that has to be done before running out to take photos is to turn off all of our acoustic sounders as they can harm their vestibular systems. Cetaceans and other mammals can lose their sense of direction and ability to communicate when high frequency sonar equipment is pinging. When the sounders are turned off it has to be electronically logged which I learned how to do. I have also been responsible for flushing and cleaning the water wall filters when they get clogged with biofouling or sea ice.
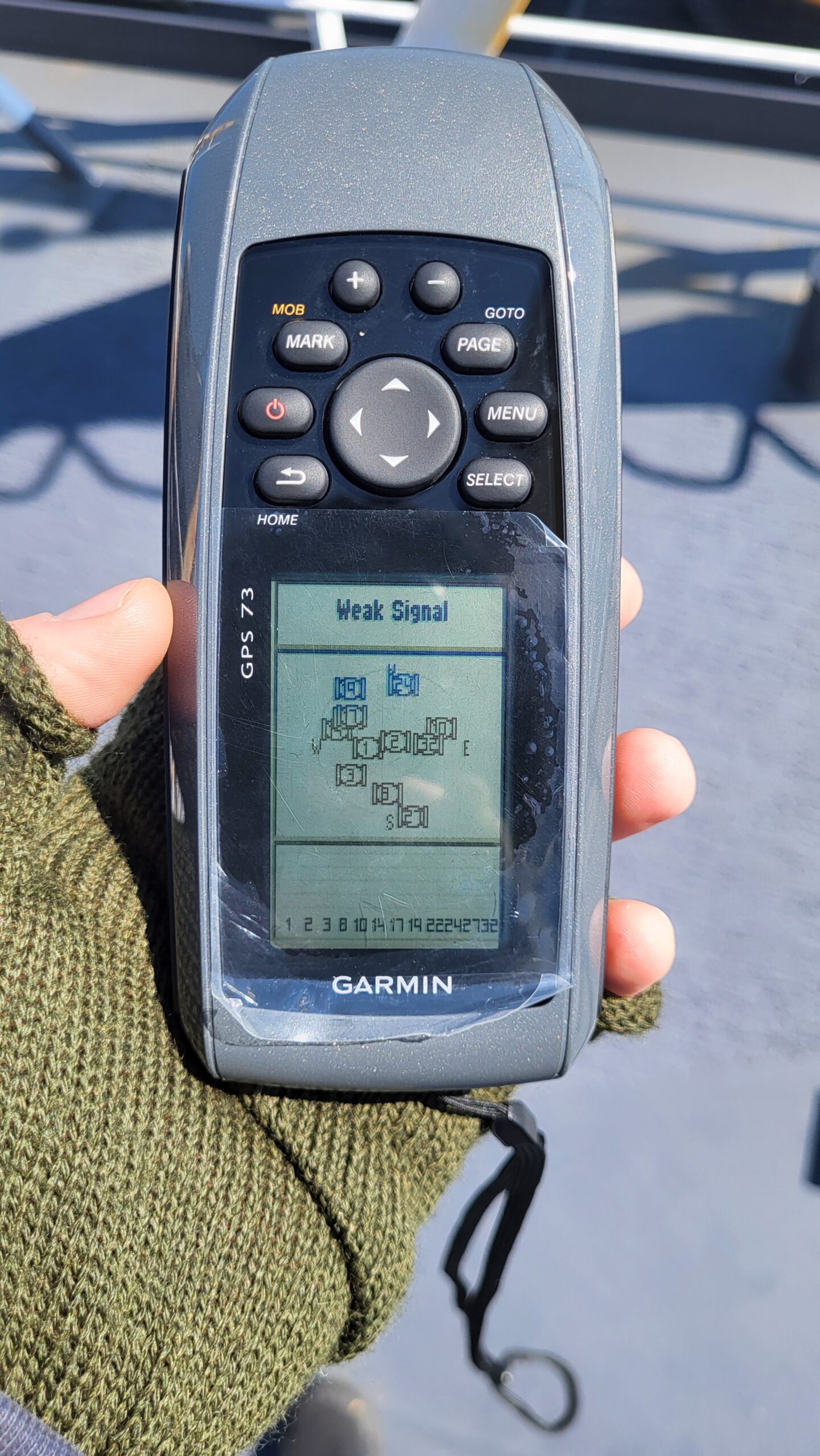
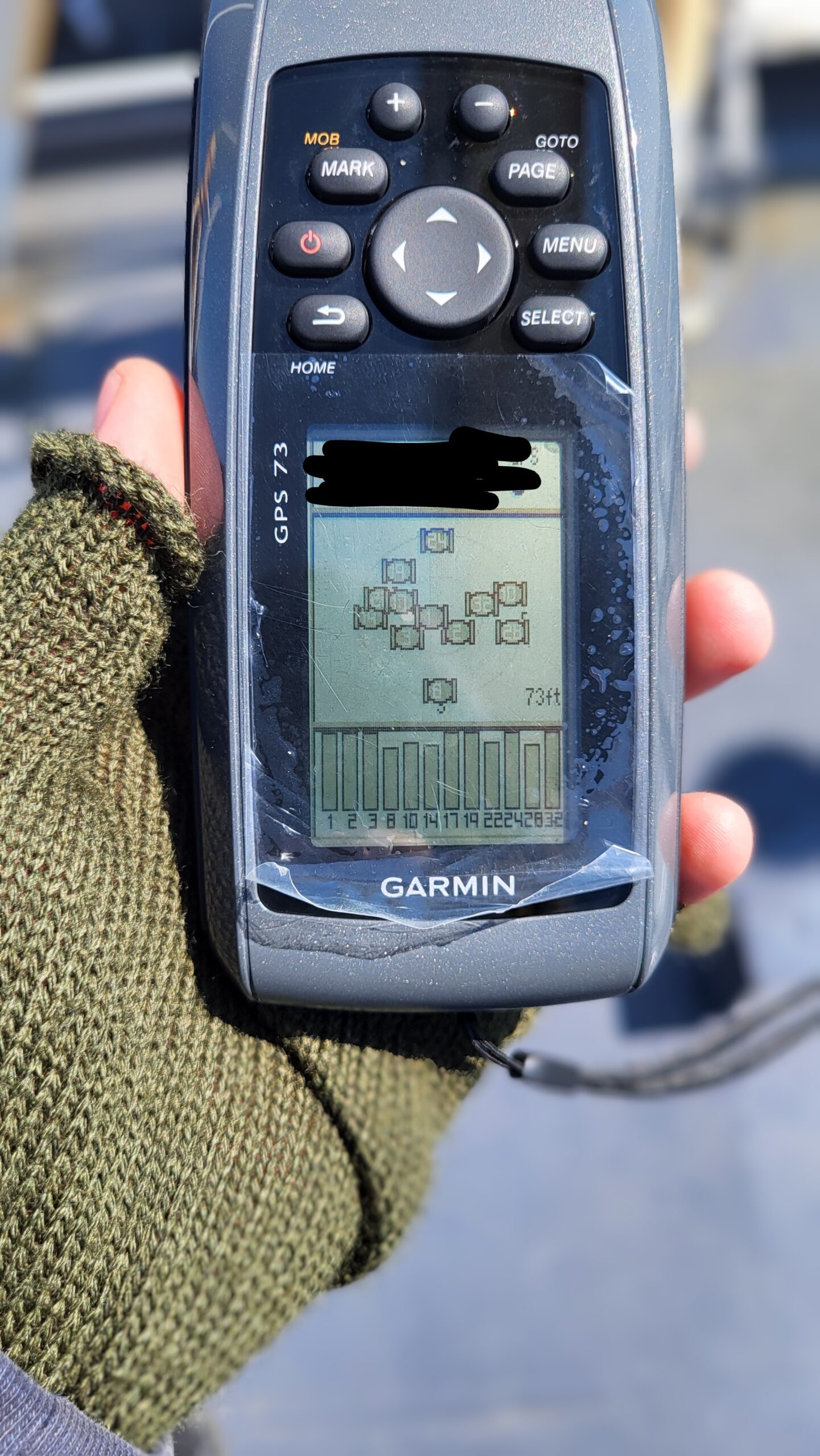
This week the STARC team has been focused on trouble shooting our Seapath GPS. We were experiencing major interference and weren’t sure what the issue was. While our GPS data isn’t used for navigation we use the data in our depth sounders and meteorological sensors for more accuracy. First we tried using a spectrum analyzer but after not being able to hone in on what frequency was causing the interference I was tasked to walk around all of our antennas with a handheld GPS. Shown in the photos you can see what a good satellite signal looks like and what a bad signal looks like. Using the handheld we were able to determine what device was causing our interference, and we will do further testing to see if it was a bad antenna, receiver, or cable fraying.
I look forward to continuing to share my experiences on Healy on this incredible cruise that I was lucky enough to be a part of.
I arrived in Seattle, Washington last week to start my journey as a MATE intern aboard the USCG Healy. My first day on base there was an issue which led me to having to stay my first night in a hotel, which wasn’t a big deal as I was able to see T-Mobile park from my room while a Mariners game was going on.
The next day I was able to get on board the ship with no issues! After finding my stateroom and getting a quick tour me and my team(consisting of Christina from the University of Washington, Howie my mentor for the trip from the Scripps Institute, and Joe from Ohio State University) had to run errands to prepare for the next few legs the Healy would make. This included going to Home Depot for heavy duty Super 88 electrical tape(the coasties on board call this “science tape”) and some other hardware, Costco for snacks, and a new suitcase for Howie cause his wheels broke boarding the ship.
The day before departure I assisted Howie and Joe in performing a land tie using a gravimeter. The gravimeter is used to track Earth’s gravity at any given point, while the land tie was performed to reference our gravity readings to a known location that had its gravity tests done back in the 1970s to ensure that our data was normal. The gravity tie is referencing the ships gravity data with data previously collected over time to check for consistency.
I spent the next day getting familiar with the ships different instruments which includes but is not limited to the gravimeter, motion reference unit, multi beam and single beam depth sounders, MET sensors, CTD, Picarro, as well as programs such as OpenVDM and OpenCDN.
One of my main tasks has been to monitor the water wall, which is the STARC teams water flow through system used to track things such as seawater temperature, salinity, oxygen levels, and chlorophyll levels. The water wall needs to be monitored as it can get clogged from bio material coming through the system as well as the sensors themselves are very fragile, and if for some reason the flow rate is too high they can break. When you are out at sea for weeks at a time you don’t want things that can’t be replaced breaking surprisingly.
Towards the end of the first week the weather was good so we were able to deploy the CTD carousel. CTD stands for conductivity, temperature, and depth, and it is an instrument that holds 24 bottles that can be remotely closed individually at the depths scientists are trying to sample water from. I helped Christina prepare the cable termination which is very important as it is not only the data transfer cable but also must be wrapped in a steel sheath in order to shackle to the winch for deployment. If this termination is too short or too long it can snap under the weight of the CTD. Different from most research vessels instead of the science or STARC teams operating the winch the Coast Guard does the actual CTD deployment, but I was able to observe as well as be the one to fire the bottle remotely. There are no science teams on board so this deployment was mainly practice, and we successfully deployed to 2000 meters deep and retrieved the water samples.
I ended off my first week with what the mess calls Sunday Sundaes in which a variety of ice cream and toppings are served which was a nice treat after a long week.
To sign off here is a photo of my last sunset in Washington before heading for the Gulf of Alaska. Goodbye Seattle!
It’s been hectic and chaotic since I last posted on the blog. I have been learning an incredible amount about what it takes to be a Marine Technician, what it takes to work on a boat, and what it takes to be a part of a small crew.
The cruise that was supposed to happen last week was pushed back to August. This was due to an engine problem and scheduling issues. The chaos and variability during this internship have shown me the importance of always being prepared for the worst-case scenario.
Adapting
The way my incredible mentors have taught and refined my approach to adaptability remains a key skill gained during this experience. Being adaptable is one of the most crucial skills needed to be a Marine Tech, and my mentors and I have had to use this skill set countless times.
During the prep for last week’s cruise, we received schematics for an EK80 single-beam system and assembled a mount based on them. We received the sonar on mobilization day. Not only was the schematic we received wrong, but the sonar already came with a mount.
Conveniently, after a little trial and error, the sonar mount perfectly fit the empty rosette. This empty rosette was originally going to house the EK80 system. Unfortunately, the empty rosette could not be used due to the stern winch not working. Thus, leading us to switch to a rosette frame with a working winch, located on the starboard side. We had to troubleshoot how to attach a sonar and Wombat system to a rosette frame, with 12 Niskin bottles, a CTD, and a fluorometer. The solution was to fabricate an additional mount ourselves for the original mount, remove the last Niskin bottle, and make a couple of small changes to attach the required sonar equipment. In the end, the setup was fully functional. Unfortunately, I was too busy to take a picture of our final result.
The Upcoming Cruise
This is the pod system that the Hugh R. Sharp uses. Attached to it is another EK80 system and an ADCP. Commonly, on the Sharp, custom mounts have to be fabricated and meet the required specs. This pod required the EK80 and the ADCP to be flush.
After assembly was finished, my mentors and I spent the day rewiring and lowering the pod via a crane in the Sharp’s adjustable keel. It was a very hot and humid day, around 92 degrees, which felt like 100.
At midday, we had an electrical blackout and had to reset all of the computers. Luckily, resetting the computers did not take long. Now that the day is done, I am finishing writing this blog post.
Conclusion
I will be taking many lessons from this incredible, eye-opening week. I have learned and accomplished many new things in just this week alone. If I wrote them all down, I would have a 10,000-word essay. I am growing through real practical experience, and I cannot wait to tell you what I learned in the upcoming week of this internship.